Autonomous Package Retrieval Robot
With Python & Opencv
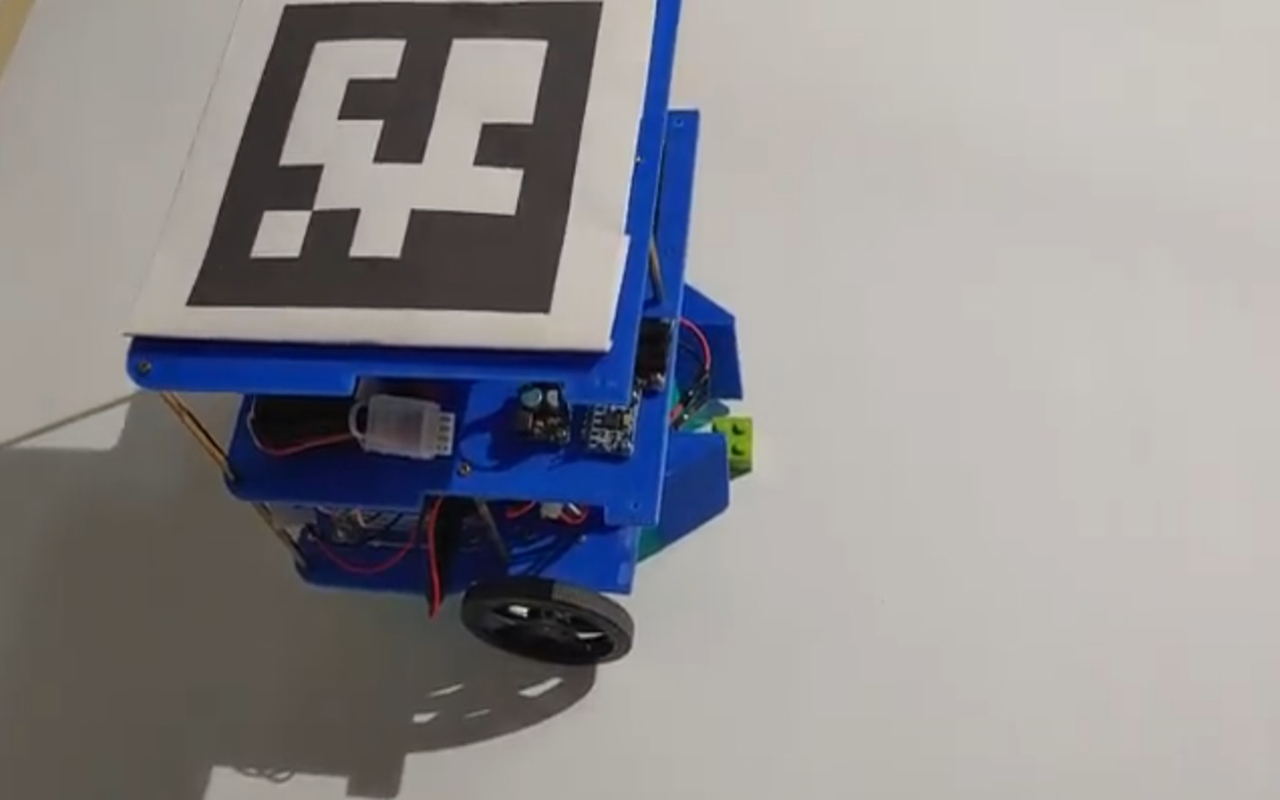
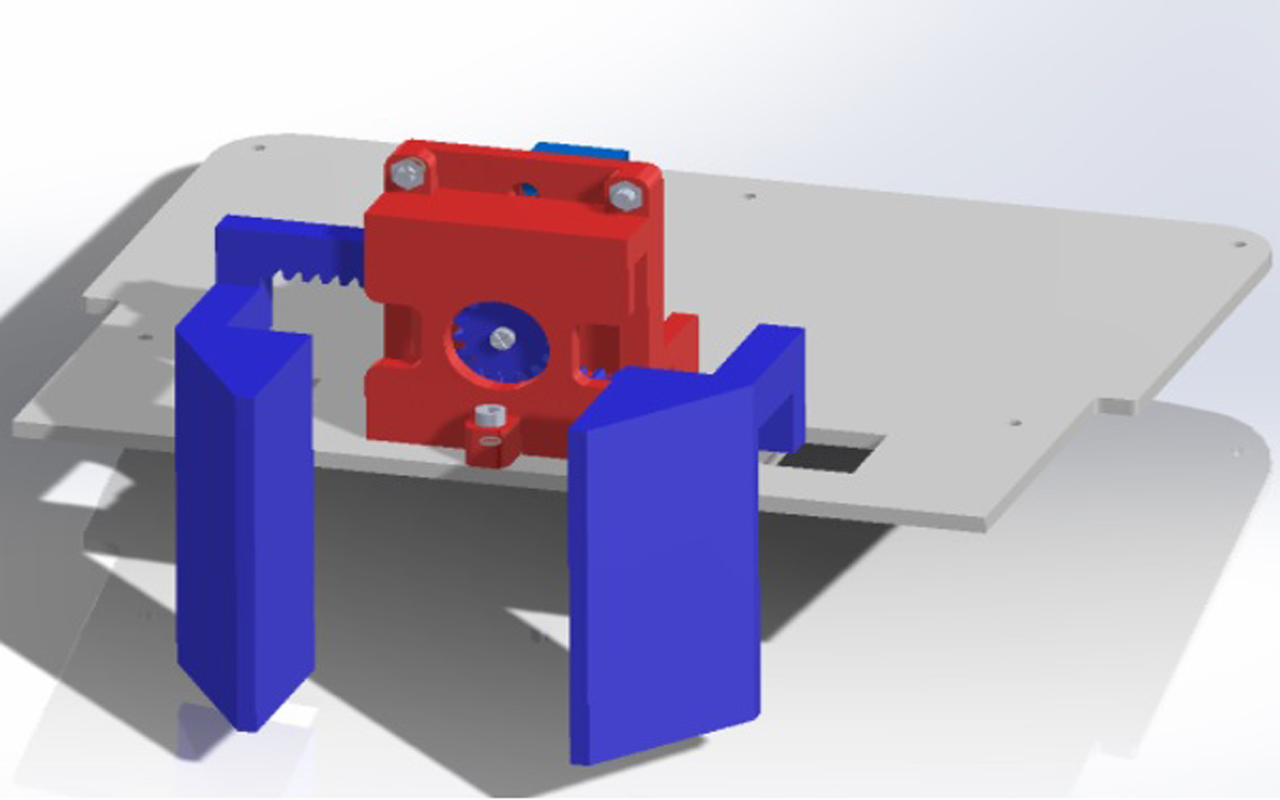
In this project we have built a simple robot capable of retreving lego blocks. We have implemented Pyhton and Opencv to design the localization system. This is done by placing an IP camrea overhead the robots workstation and then using Python to detect and track objects that are in view of the camera. The robot is equiped with a gripper which lets us pickup and dropoff the lego blocks. Both the gripper and wheels are operated using an Arduino Due 32-bit microcontroller to control the servo motor, L293D motor shield and encoders.


Activity Breakdown Time:
Design
Build
Program
Testing
Indoor Localization
Radio-Frequency Identification Based
In this project we have designed and built an indoor localization system using RFID for mobile robots. The system works using a simultaneous RFID reader which sends out a radio signal through an antenna. This signal then activate passive RFID tags which will also then send a signal to the reader with identifying grid position data. From here, the reader sends this returned data to the connected Arduino UNO in the form of an electronic product code (EPC). The EPC is a universal identifier that provides a unique identity for every RFID tag currently employed in the grid system. Finally, the Arduino sends this information to the developed python localization map where it is displayed to the user as a simple GUI app as seen in Figure 14. The data is read according to its assigned EPC and then actively updated on the map in the form of a tracking dot.
Activity Breakdown Time:
Design
Build
Program
Testing
WHERE I WORK
I'd love your feedback!
Email: RobotGooners@gmail.com