List of Parts

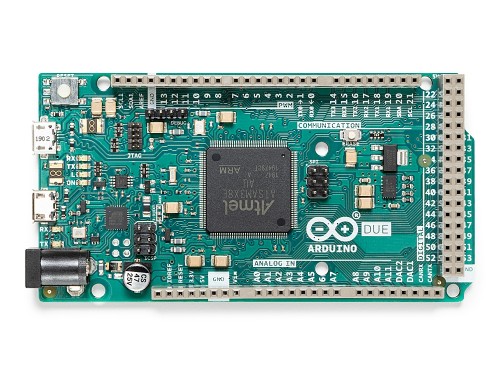
Arduino Due 32 Bit
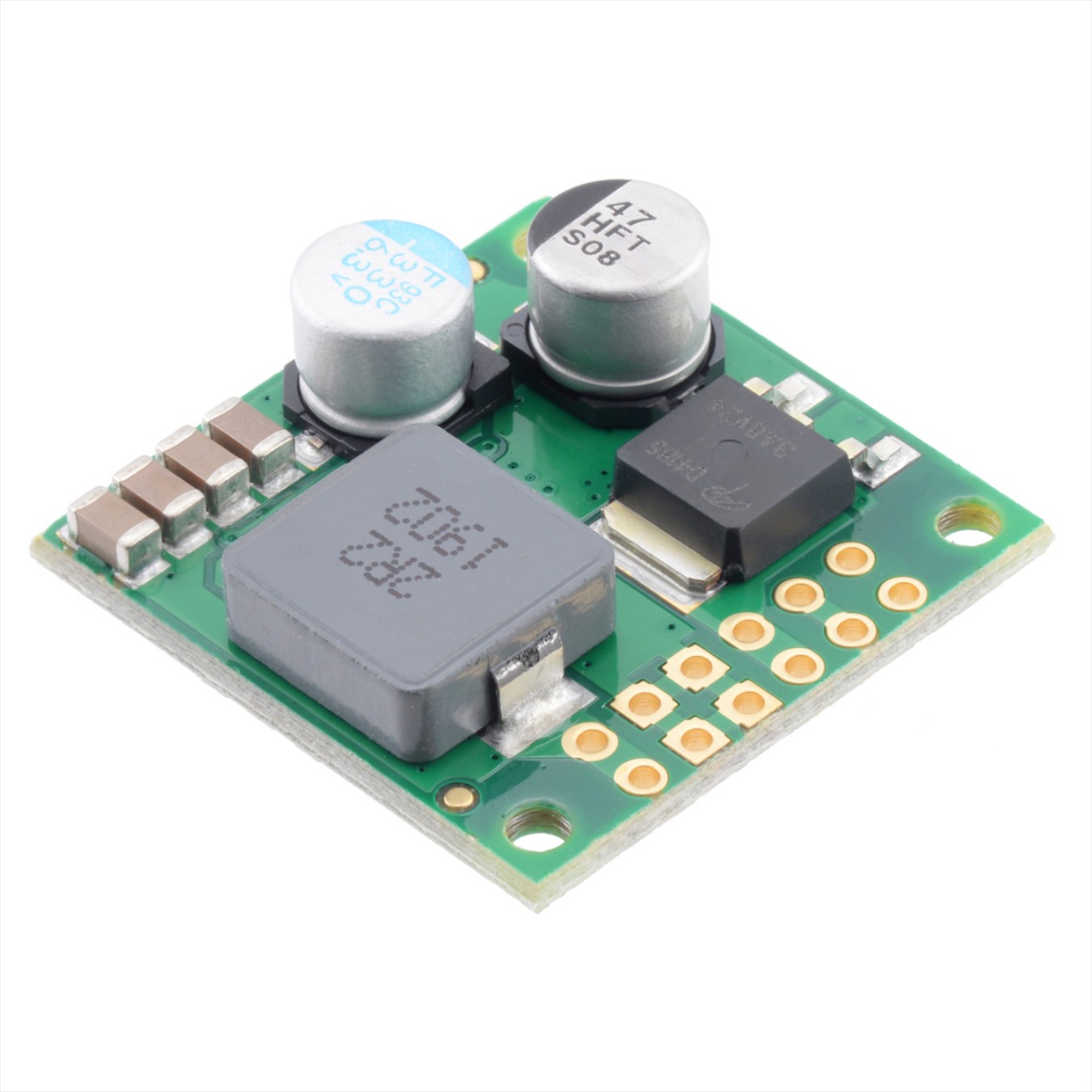 Step Down Voltage Regulator
Step Down Voltage Regulator
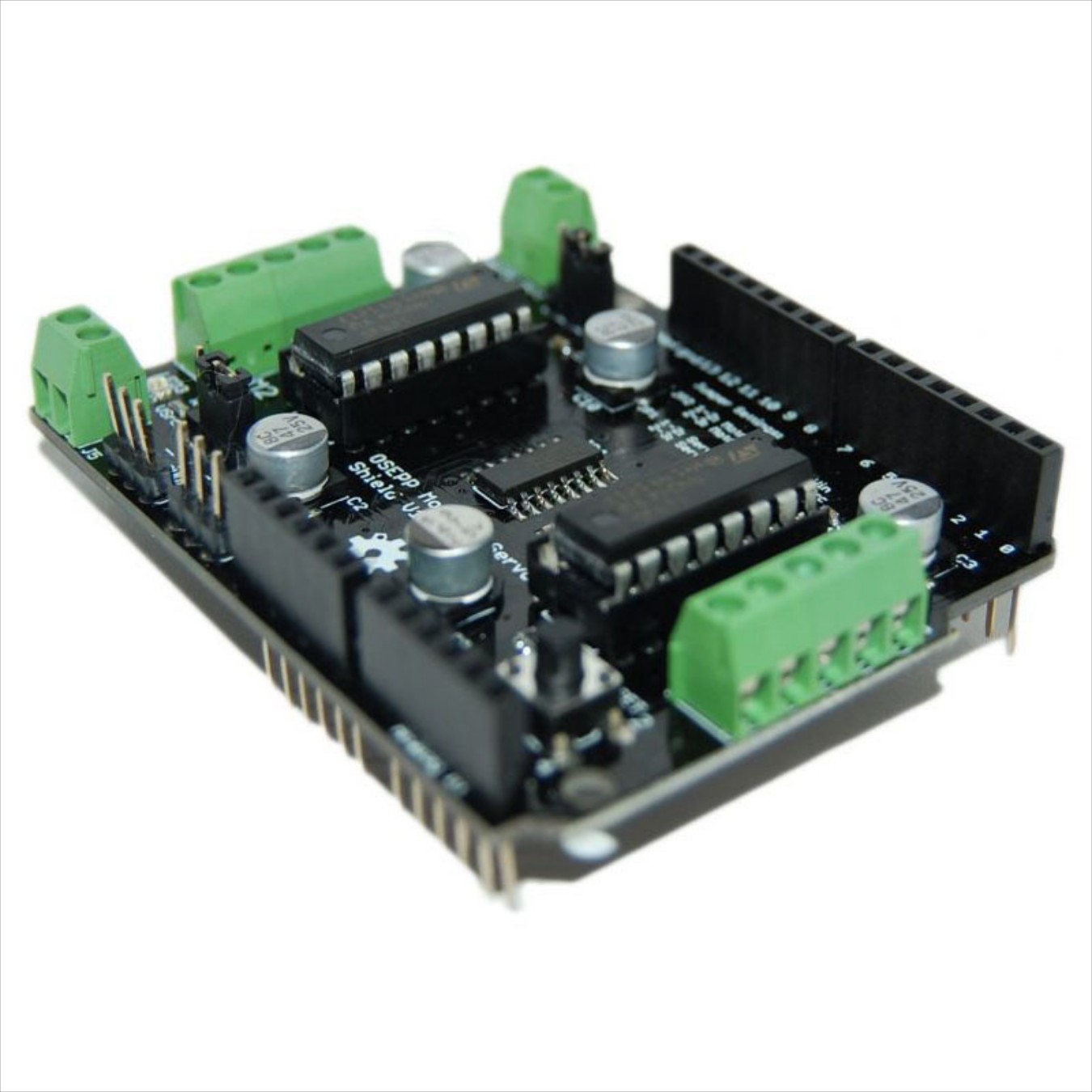 Arduino Motor Shield
Arduino Motor Shield
 Encoder Bracket
Encoder Bracket
 RC Tires
RC Tires
 Servo Motor
Servo Motor
 6v 210:175 micro metal gearmotor and encoder
6v 210:175 micro metal gearmotor and encoder
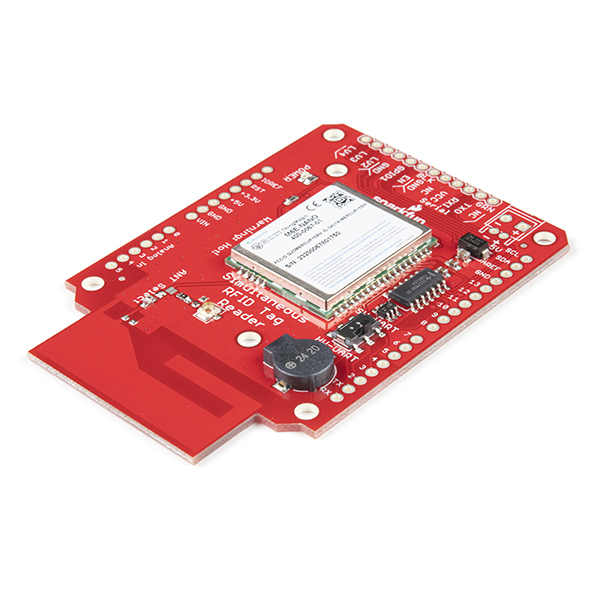 SparkFun Simultaneous RFID Reader
SparkFun Simultaneous RFID Reader

GOLDBAT 11.1v lipo
 Lynxmotion Bracket Kit
Lynxmotion Bracket Kit
 Jumper Wire Kit
Jumper Wire Kit
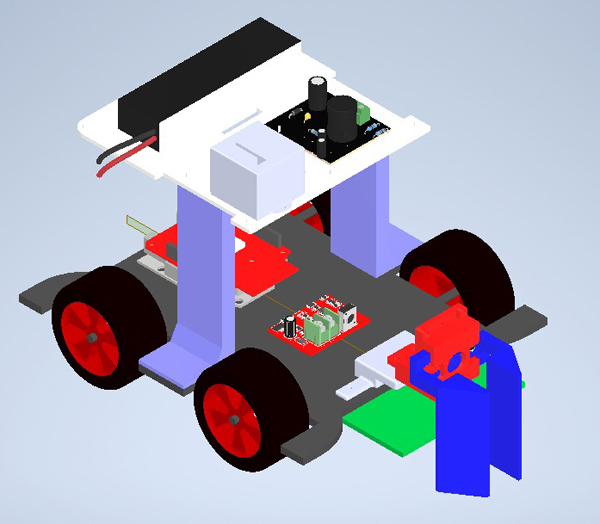
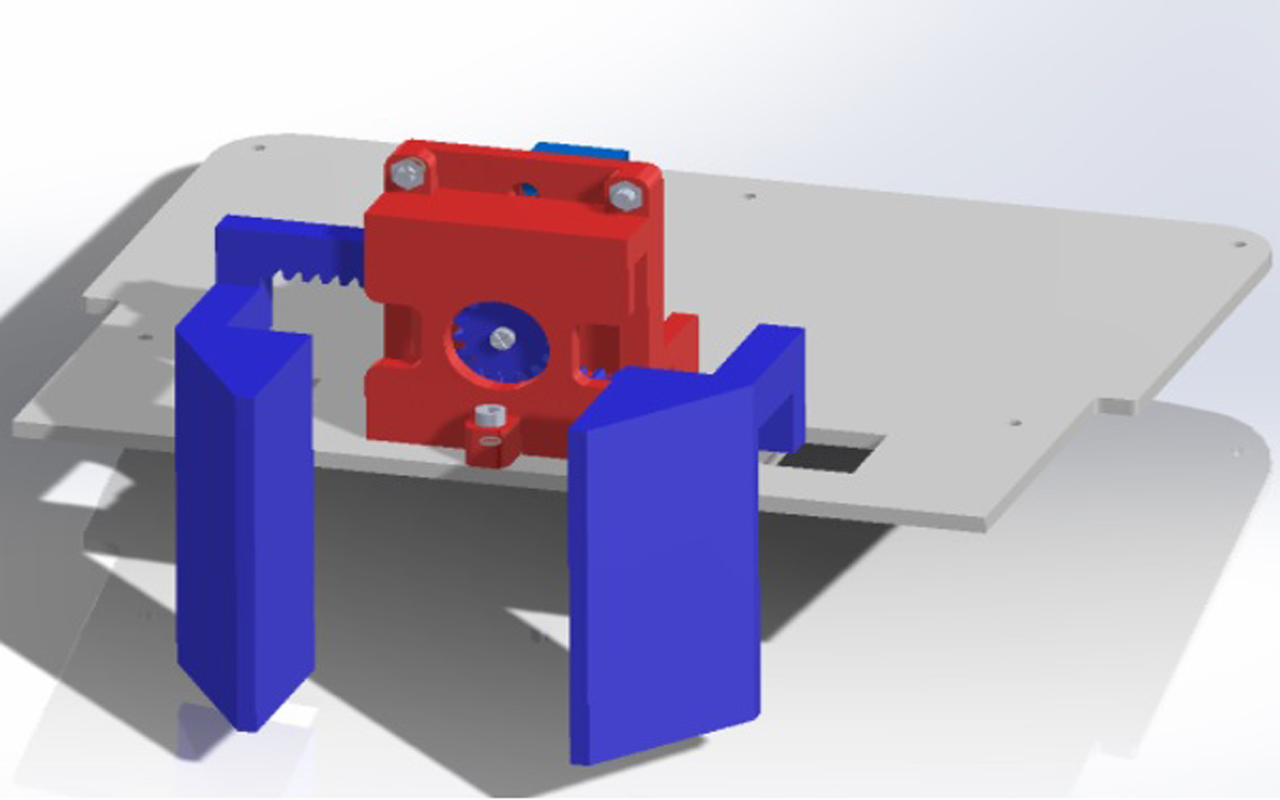
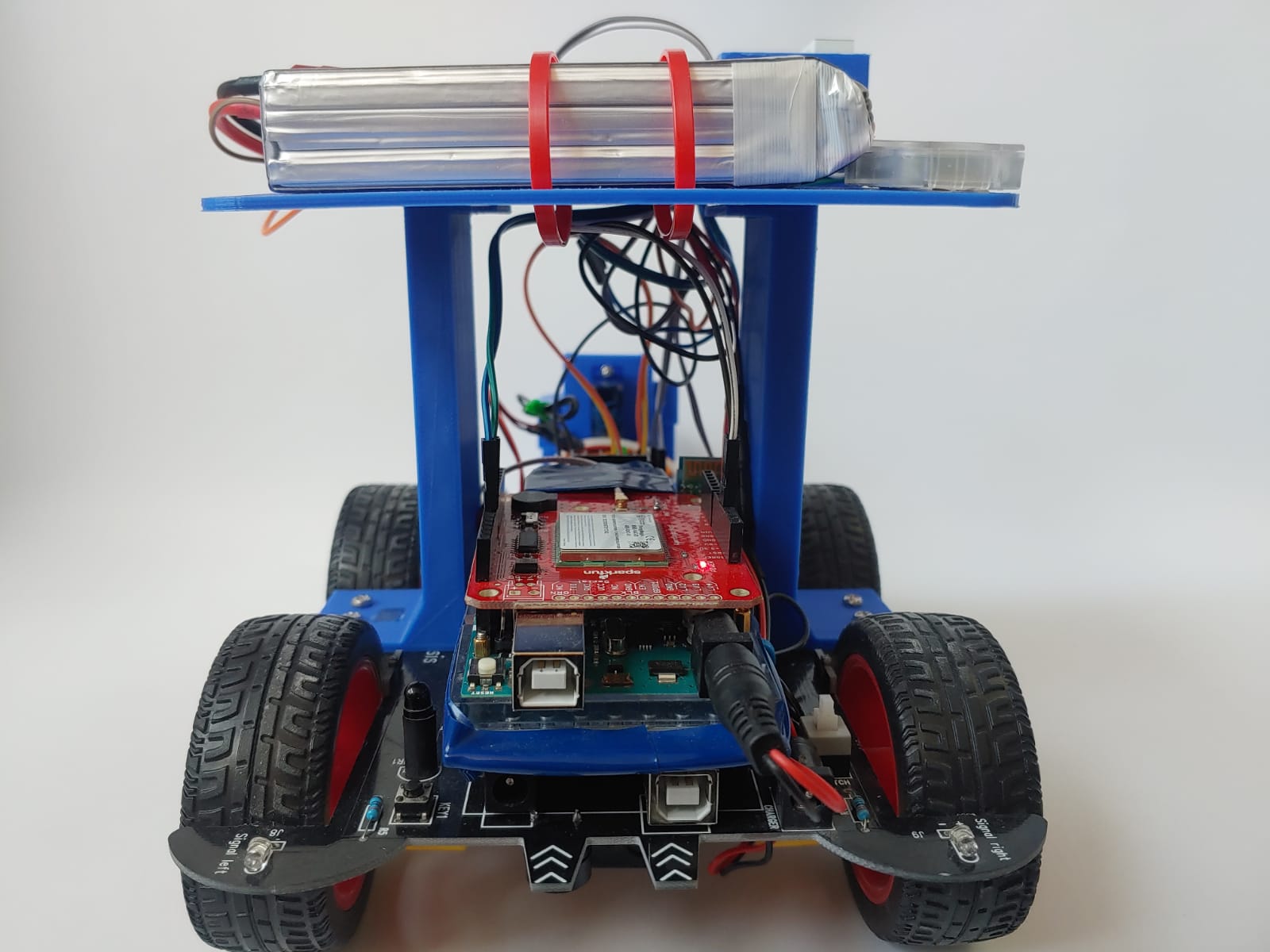
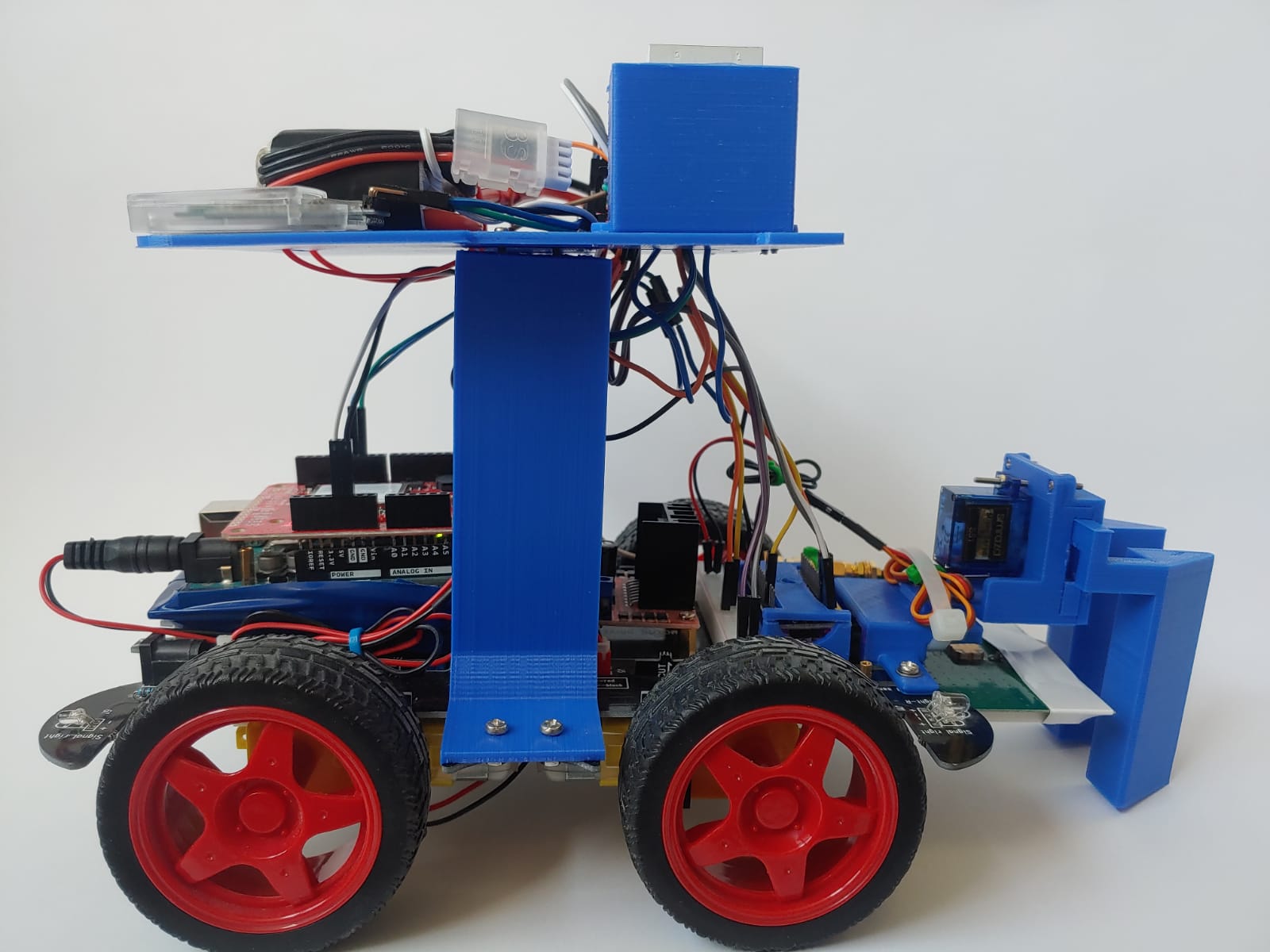
Mechanical Design
Here's a short run down of the mechanical design. We used Siemens NX to produce the CAD model of the robot shown below along with the mechanical gripper. Then we used a 3D printer to produce the parts of the robots body and gripper. An RC car body and wheels were used as we built the support strucures and gripper depicted below.
Localization Design
Python and Arduino languages are used in the development of the programming of the system. The Arduino C-based language is used to instruct the microcontrollers. Data is sent from the Arduino to Python via a Bluetooth module. For Python to catch the data the Arduino is throwing across the Bluetooth path it must have an object in place to catch this data. This is done using the pySerial package. Using Pyserial a serial object is made, this object is positioned at a COM port with a specified baud rate, these variables should match the COM port and baud rate used on the microcontroller. The serial object opens the serial port, it will then catch all data that the Arduino throws along the Bluetooth path. Here the Arduino will throw a letter, this letter is found when the RFID reader reads a tag, based on the data on the tag, as discussed previously, a specific letter will be thrown, Python will then catch this letter and read it as a string. In Python strings are an array, this is important because we must specify where on this array we want to point to. The position of the tracked robot is updated using a simple series of ‘if’ statements. We ask if the string at index 0 is equal to a specific letter then update the position on the map. Using this method the position of the robot is updated whenever the RFID reader collects data from a tag. For code Visit: RFID Localization